
Chang’e 7
| Chang’e 7 | |
|---|---|
| NSSDC ID | (noch nicht vergeben) |
| Missionsziel | Shackleton-Krater, Erdmond[1] |
| Auftraggeber | CNSA |
| Trägerrakete | Changzheng 5 |
| Startmasse | 8,2 t |
| Verlauf der Mission | |
| Startdatum | Ende 2026 (geplant) |
| Startrampe | Kosmodrom Wenchang |
Chang’e 7 (chinesisch 嫦娥七號 / 嫦娥七号, Pinyin Cháng'é Qīhào) ist eine geplante unbemannte Mondsonde der Nationalen Raumfahrtbehörde Chinas, die Ende 2026 mit einer Trägerrakete vom Typ Changzheng 5 vom Kosmodrom Wenchang auf Hainan gestartet werden soll.
Übersicht
Nach dreizehnjährigen Vorbereitungsarbeiten startete Premierminister Wen Jiabao am 24. Januar 2004 das Mondprogramm der Volksrepublik China. Es bestand ursprünglich aus Drei Großen Schritten, die jeweils wiederum in Kleine Schritte unterteilt waren. Mit der Probenrückführmission Chang’e 5 fand der Dritte Kleine Schritt und der Erste Große Schritt in Dezember 2020 seinen Abschluss. Nach der für 2024 angesetzten Probenrückführmission Chang’e 6 zum Apollo-Krater auf der erdabgewandten Seite des Mondes[2] sollen nun Chang’e 7 und Chang’e 8 den Aufbau der Internationalen Mondforschungsstation vorbereiten, zunächst an einem Standort nahe dem Südpol des Mondes am inneren Ring des Südpol-Aitken-Beckens,[3] langfristig mit über den gesamten Mond verteilten Einrichtungen.[4] Chang’e 7 soll ab 2026 Topographie und Bodenzusammensetzung in Polnähe ausführlich untersuchen. 2028 sollen dann bei der Mission Chang’e 8 Technologien zur Nutzung örtlicher Ressourcen erprobt werden.[5]
Aktivitäten in der Südpolregion des Mondes, die als das Gebiet zwischen 85° und 90° südlicher Breite definiert ist,[3] stellen eine beträchtliche Herausforderung dar. Einerseits würde der Polarsommer mit 180 Tagen Sonnenschein und relativ milden Temperaturen von −100 bis −80 °C (also nur 20 °C Temperaturdifferenz)[6] durchgehende halbjährige Aufenthalte ermöglichen – auf der Rückseite des Mondes fallen die Temperaturen während der Nacht auf bis zu −196 °C.[7][8] Andererseits gibt es dort eine bis zu 185 Tage dauernde Polarnacht und selbst im lunaren Sommer liegt der Einfallswinkel der Sonnenstrahlen bei nur 1° – 4°. Dies erschwert die optische Vorerkundung aus der Umlaufbahn, und die Auflösung bei Laser- oder Mikrowellenabtastung reicht oft nicht für eine gründliche Missionsplanung aus. Dazu kommt noch das zerklüftete Terrain. Steile Kraterwände mit einem Neigungswinkel von 30° – 40° erzeugen Schattenzonen, wo für längere Zeit keine Stromerzeugung mit Solarmodulen möglich ist. Dadurch ist die Auswahl der möglichen Landepunkte stark eingeschränkt, die dazu noch mit einer Präzision von 100 m angeflogen werden müssen, während bei den Missionen Chang’e 3 und Chang’e 4 der erlaubte Fehler im Kilometerbereich lag.[9]
Wegen der Schwierigkeit des Terrains hat man für Chang’e 7 mehrere Landestellen ins Auge gefasst, die zuerst aus dem Orbit genauer untersucht werden sollen. Dies wird dann im Verlauf der Mission auf zwei Landepunkte reduziert. Erst im letzten Moment wird die Entscheidung für den endgültigen Landepunkt getroffen.[10][11]
Komponenten
Die Sonde mit einem Startgewicht von insgesamt 8,2 t besteht aus folgenden Komponenten, die mit Ausnahme der Kleinsonde alle eine geplante Lebensdauer von mindestens acht Jahren haben sollen:
- Einem Orbiter in einer um 90° zum Mondäquator geneigten Polarbahn von 200 km Höhe[3] mit diversen Messgeräten und einem experimentellen Kommunikationslaser für schnelle Datenübertragung zwischen Mond und Erde.[12]
- Einem Lander mit diversen Messgeräten, darunter einem Seismographen, der auf einer kleinen Hochebene am Rand des Südpol-Aitken-Beckens bei gut 85° südlicher Breite landen soll.[3][13]
- Einem Rover mit diversen Messgeräten und der Möglichkeit zum Ausbringen von Sprengladungen zur Erzeugung von künstlichen Mondbeben.[14] Der Rover soll im Prinzip genauso aufgebaut sein wie Jadehase 2, allerdings etwas größer und mit einem höheren Grad an Autonomie ausgestattet.[15] Da am Südpol des Mondes die Sonnenstrahlen sehr flach einfallen, besitzt der Rover keine horizontalen Solarmodule, sondern ein senkrechtes, aus zwei ausklappbaren Modulen bestehendes und um die Längsachse drehbares Sonnensegel am Heck.[16]
- Einer flugfähigen Kleinsonde mit einer Lebensdauer von 3 Monaten, die in einem ständig im Schatten liegenden Gebiet eines Kraters neben der Landestelle von Chang’e 7 landen, dann wieder starten und auf der besonnten Seite des Kraters landen soll, dann wieder zurück in den Schatten.[17] Insgesamt soll es in diesem Krater vier derartige Flugmanöver geben. Hierbei soll die Kleinsonde mindestens drei Bodenproben entnehmen[18] und mithilfe eines mitgeführten Analysegeräts sofort auf Wasser- und Methanmoleküle sowie Wasserstoffisotope untersuchen, um so eventuell von Kometen eingetragenes Eis aufzuspüren.[19] Wenn möglich soll die Kleinsonde auch noch einen zweiten Krater auf diese Art erforschen.[20] Eines der Probleme hierbei ist, dass Eis die Elastizität und damit die Stoßdämpfungseigenschaften bei der Landung verändern würde, was sich nur schwer vorausberechnen lässt. Im Schatten ist es auch nicht möglich, bei der Landung bildverarbeitende Hindernisvermeidungssysteme einzusetzen, weshalb man auf Laser-Entfernungsmessung und einen dreidimensional abbildenden Laserscanner zurückgreifen muss. Der unbekannte Reflexionsgrad des Bodenmaterials und gegebenenfalls Eises stellt hierbei jedoch eine große Herausforderung dar.[9] Im Oktober 2022 war angedacht, die Kleinsonde mit Scheinwerfern zu versehen.[21]
Wissenschaftliche Nutzlasten
Insgesamt werden bei dieser Mission 23 wissenschaftliche Nutzlasten zum Einsatz kommen (zum Vergleich: bei Tianwen-1, der bislang anspruchsvollsten Mission der chinesischen Raumfahrtbehörde, wurden 13 Nutzlasten mitgeführt).[22] Ähnlich wie bei dem Biosphärenexperiment der Chongqing-Universität auf dem Lander von Chang’e 4 lobte die Nationale Raumfahrtbehörde für diese Mission einen Wettbewerb aus, bei dem Grundschüler, Gymnasiasten und Hochschulstudenten aus der Volksrepublik China, Taiwan, Hongkong und Macau vom 29. Juli bis zum 31. Oktober 2020 Vorschläge für eine interessante wissenschaftliche Nutzlast machen konnten. Entwicklung und Bau der Nutzlast wird von der Nationalen Raumfahrtbehörde organisiert, das geistige Eigentum gehört zu gleichen Teilen dem chinesischen Staat und dem Wettbewerbsgewinner (eine Einzelperson oder eine Gruppe mit bis zu sechs Mitgliedern).[23] Aus 578 eingereichten Vorschlägen wählte das Zentrum für Monderkundungs- und Raumfahrt-Projekte in Zusammenarbeit mit Ministerien und Stiftungen zur Förderung der Naturwissenschaften nach eingehender Begutachtung im April 2021 in einer ersten Selektionsrunde 60 Projekte aus.[24] Am 13. Mai 2021 wurden aus diesen wiederum 20 Projekte ausgewählt, über die die chinesische Bevölkerung in einer Online-Abstimmung entscheiden konnte.[25]
Am 21. September 2021, fünf Tage nach der Unterzeichnung des Kooperationsabkommens mit dem Muhammad-bin-Raschid-Raumfahrtzentrum, veröffentlichte die Nationale Raumfahrtbehörde einen weltweiten Aufruf an Institutionen, sich mit eigenen Nutzlasten an der Mission zu beteiligen. Da nun ein zusätzlicher Mechanismus für das Aussetzen des emiratischen Rovers erforderlich war, wurde die gesamte Sonde umkonstruiert und verbessert. So sind nun zum Beispiel die Solarmodule an Lander, Rover und Kleinsonde senkrecht angeordnet, um das flach einfallenden Sonnenlicht in der Polregion besser zu nutzen. Der ursprünglich geplante Relaissatellit Elsternbrücke 2 soll jetzt 2024 separat gestartet werden.[26] Auf dem Orbiter stand nun Platz für eine weitere Nutzlast mit den Maßen 30 × 20 × 20 cm und bis zu 15 kg Gewicht zur Verfügung, auf dem Lander 30 × 15 × 15 cm und bis zu 10 kg Gewicht. Während der Polarnacht sinkt die Temperatur an der Landestelle auf −180 °C, der Lander kann jedoch ein gewisses Maß an Heizung zur Verfügung stellen. Interessierte Institutionen mussten bis zum 1. Februar 2023 sowohl bei der Nationalen Raumfahrtbehörde Chinas als auch bei der Raumfahrtbehörde oder zuständigen Einrichtung ihres eigenen Landes einen Antrag mit einer Kurzbeschreibung ihres Projekts einreichen. Bis zum 1. April 2023 fand eine Vorauswahl statt. Nachdem gemeinsame Arbeitsgruppen die Projekte konkretisiert haben, findet auf Regierungsebene die Unterzeichnung eines offiziellen Kooperationsabkommens zwischen der Volksrepublik China und dem Heimatland der ausgewählten Institution statt.[3]
Für 17 der Nutzlasten veranstaltete das Zentrum für Monderkundungs- und Raumfahrt-Projekte ab dem 26. August 2020 eine öffentliche Ausschreibung, bei der juristische Personen der Volksrepublik China entsprechend den vom Nationalen Zentrum für Weltraumwissenschaften festgelegten Anforderungen bis zum 30. September 2020 Angebote für Entwicklung und Bau besagter Nutzlasten einreichen konnten. Maximales Gewicht und Stromverbrauch waren genau festgelegt. Für die meisten Nutzlasten war eine Mindestlebensdauer von 8 Jahren gefordert, für das Analysegerät auf der kleinen Kratersonde 3 Monate, für einen experimentellen Kommunikationslaser auf dem Orbiter 2 Jahre. Die chinesischen Firmen und Institutionen wurden dazu ermutigt, sich in- und ausländische Partner zu suchen und gemeinsame Angebote einzureichen, wobei nach dem Prinzip der Joint Ventures immer die chinesische Firma die Verantwortung zu tragen hatte.[27] Im Rahmen des 28. Chinesisch-Russischen Premierministertreffens am 19. Dezember 2023 in Peking vereinbarten Li Qiang und sein Amtskollege Michail Wladimirowitsch Mischustin, dass eine der wissenschaftlichen Nutzlasten auf dem Lander der Sonde von einer russischen Institution gestellt werden sollte.[28]
Hier einige der Nutzlasten:
Orbiter
- Panchromatische Stereokamera mit einer Auflösung von 50 cm und einer Schwadbreite von 18 km bei einer Flughöhe von 100 km. Diese mit Autofokus ausgestattete Kamera soll mittels der Time-Delay-Integration-Technik auch bei schwacher Beleuchtung weitgehend selbstständig Daten für eine dreidimensionale Mondkarte ermitteln.
- Abbildendes Mikrowellenradar mit Mehrfachpolarisation, einer Auflösung von 30 cm und einer Schwadbreite von 5–20 km bei einem Bildwinkel von 15° – 45°. Mit diesem nach dem Prinzip des Synthetic Aperture Radar arbeitenden Gerät sollen hochauflösende Aufnahmen von den in permanentem Schatten liegenden Stellen im Südpol-Aitken-Becken gemacht werden, wo sich potentiell Kometeneis gehalten hat.[29][30] Anhand der Radardaten soll insbesondere die Struktur der bei Einschlägen gebildeten Auswurfmaterial-Haufen erforscht werden.[31]
- Abbildendes Spektrometer für Wellenlängen zwischen 0,45 μm und 10 μm, mit einer spektrographischen Auflösung von 200 nm im Bereich von 3 bis 10 μm (Wärmestrahlung) und 10 nm im Bereich von 0,45 bis 3 μm (sichtbares Licht und nahes Infrarot) sowie einer räumlichen Auflösung von 0,3 mrad bei 3 bis 10 μm und 0,2 mrad bei 0,45 bis 3 μm. Mit diesem Gerät soll eine hochauflösende Karte der Oberflächentemperaturen auf dem Mond erstellt werden, außerdem dient es der Suche nach Bodenschätzen und der Kartografierung ihrer Verteilung.
- Neutronen- und Gammastrahlenspektrometer zur Registrierung von heißen Neutronen mit einer kinetischen Energie von 0 bis 0,4 eV, ultraheißen Neutronen mit einer kinetischen Energie zwischen 0,4 eV und 700 keV, schnellen Neutronen mit einer kinetischen Energie zwischen 700 keV und 5 MeV sowie Gammastrahlung mit einer Energie von 0,3–9 MeV. Mit diesem Gerät sollen auf dem gesamten Mond, insbesondere aber an den beschatteten Stellen in den Polregionen schnelle Neutronen und heiße Neutronen gemessen werden, um einen Eindruck von der Verteilung und Konzentration von Wasserstoff in den Schichten direkt unterhalb der Oberfläche zu bekommen.[32][33] Mit der Messung der Gammastrahlung auf der gesamten Mondoberfläche soll die Verteilung der chemischen Elemente und deren Konzentration kartografiert werden.
- Magnetometer mit einem Messbereich von ±2000 nT und einer Auflösung von 0,01 nT. Das Gerät ist mit 0,01 nT/°C relativ temperaturstabil, nimmt etwa 128 Messungen pro Sekunde vor und kann nicht nur die Stärke, sondern auch die Richtung der Magnetfeldlinien bestimmen. Im Zusammenwirken mit einem zweiten Magnetometer auf dem Rover sollen Erkenntnisse über das sehr schwache Magnetfeld des Mondes gewonnen werden, um daraus Rückschlüsse über seinen inneren Aufbau ziehen und Aussagen über das Weltraumwetter im mondnahen Raum treffen zu können.
- Laser Communication Terminal mit einer Leistungsaufnahme von 200 W für schnelle Kommunikation mit der Erde. Die Datenübertragungsrate vom Orbiter zur Erde liegt bei 2 Gbit/s, die Übertragung von Steuersignalen von der Erde zum Orbiter erfolgt mit 1 Mbit/s, in beiden Richtungen mit einer Datenverlustrate von weniger als 10−7. Die Bodenstation kann das Gerät auf dem Orbiter in weniger als 60 Sekunden erfassen und über einen Zeitraum von einer Stunde 100 % anvisiert halten. Zum Vergleich: der Kommunikationslaser auf dem geostationären Experimentalsatelliten Shijian 20 erreicht eine Übertragungsrate von 10 Gbit/s.
Lander
- Gerät zur Messung flüchtiger Verbindungen und Elemente im Regolith. Das Gerät kann zwischen den Isotopen einzelner Elemente unterscheiden, also zum Beispiel Helium-3 erkennen, das in fernerer Zukunft als Brennstoff für Kernfusionsreaktoren verwendet werden könnte. Zunächst möchte man jedoch die Herkunft des Stickstoffs auf der Mondoberfläche ergründen und einen Eindruck vom geologischen Alter der Landestelle und dem Verwitterungsgrad des Regoliths dort bekommen. Das Gerät soll fünf Proben der sehr dünnen Exosphäre des Mondes nehmen und in seinem Analysebereich zwischen 2 und 150 amu mit einer Auflösung von 1 amu nach folgenden Stoffen suchen und deren Gehalt in der Probe mit einer Genauigkeit von 1 % bestimmen:
- Wasserstoff (H2)
- Helium (He)
- Wasser (H2O)
- Neon (Ne)
- Argon (Ar)
- Xenon (Xe)
- Stickstoff (N2)
- Kohlenstoffmonoxid (CO)
- Kohlenstoffdioxid (CO2)
- Ammoniak (NH3)
- Methan (CH4)
- Ethan (C2H6)
- Umweltmesssystem zur Messung von Ladungsträgern, Mondstaub und des elektromagnetischen Feldes um die Wechselwirkung von Sonnenwind und kosmischer Strahlung mit der Materie und den Feldern auf der Mondoberfläche zu erforschen und die Entstehungsmechanismen der mikrophysikalischen Struktur des Weltraumwetters zu verstehen. Die über einen Zeitraum von mindestens acht Jahren gesammelten Daten sollen zur Risikoabschätzung bezüglich des Weltraumwetters am Standort und der Ausarbeitung von entsprechenden Sicherheitsmaßnahmen für die geplante Forschungsstation dienen. Das nächste Sonnenfleckenmaximum mit dem höchsten Gefahrenpotential wird für 2025 erwartet, das Minimum dann fünf Jahre später (d. h. die für 2030 geplante bemannte Landung erfolgt zu einer relativ sicheren Zeit). Im Einzelnen werden folgende Dinge gemessen:
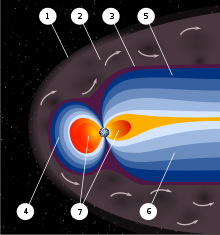
Die irdische Magnetosphäre. 1=Bugstoßwelle, 2=Magnetosheath, 3=Magnetopause, 5,6=Magnetschweif, 7=Plasmasphäre. - Elektronen mit einer Energie von 1 eV bis 12 MeV, Protonen mit einer Energie von 1 eV bis 300 MeV und Schwerionen mit einer kinetischen Energie von 8 MeV bis 300 MeV. Das Sichtfeld des Geräts beträgt 360° × 90° im Bereich von 1 eV bis 30 keV und 360° × 40° im Bereich von 30 keV bis 300 MeV. Die absorbierte Strahlendosis wird mit einer Empfindlichkeit von 20 μSv/h gemessen, das Spektrum für die Messung des linearen Energietransfers erstreckt sich von 0,001 bis 37 MeV/(mg/cm²).
- Die Ablagerung von Staub- und Sandpartikeln mit einer Größe von 1 μm bis 5 mm wird im Bereich von 10−9 g/cm² bis 3×10−4 g/cm² in drei orthogonalen Richtungen gemessen, die Geschwindigkeit der Staubpartikel wird im Bereich von 0,01 bis 500 m/s bestimmt.
- Das elektrische Feld wird mit einer Präzision von 1 μV/m im Bereich von ±10 V/m gemessen, das Magnetfeld mit einer Präzision von 3 pT im Bereich von ±1024 nT und 0,05 nT im Bereich von ±65 μT.
- Kamera für extrem ultraviolette Strahlung in zwei Spektralbänder zentriert um 30,4 nm (mit einer Bandbreite von 5 nm) und 83,4 nm (mit einer Bandbreite von 23 nm) für Aufnahmen von der irdischen Plasmasphäre (dem inneren Teil der Magnetosphäre) und dem sogenannten Magnetosheath zwischen Bugstoßwelle und Magnetopause. Damit sollen Daten über die Morphologie der Plasmasphäre und die Verteilung von Oxid-Ionen (O2−) im erdnahen Raum ermittelt werden, um Erkenntnisse über die Koppelungsmechanismen zwischen Plasmasphäre und Ionosphäre sowie die Prozesse bei der Wechselwirkung zwischen Sonnenwind und Magnetosphäre gewonnen werden. Die staubgeschützte und während der Mondnacht warm gehaltene Kamera mit einem Bildwinkel von 20° kann in Richtung Erde (die selbst unter dem Horizont steht) ausgerichtet werden. Das Auflösungsvermögen für Aufnahmen von der Plasmasphäre beträgt 0,1°, für Aufnahmen vom Magnetosheath 0,4°.
- Drei-Komponenten Breitband-Seismometer mit einem Frequenzbereich von 1/120 bis 100 Hz und einem Messbereich von 120 dB, was einem Erdbeben der Magnitude 4 entspricht. Am unteren Rand des Spektrums kann das Seismometer auch sehr schwache Beben mit einer negativen Magnitude von bis zu −4 auf der Richterskala registrieren. Mit diesem Gerät, das vom Lander auf der Mondoberfläche abgesetzt wird und sich automatisch waagrecht ausrichtet, soll die seismische Aktivität in drei Richtungskomponenten (vertikal, Ost-West, Nord-Süd) über einen langen Zeitraum beobachtet werden,[34] um Erkenntnisse über die physikalischen Mechanismen bei Mondbeben sowie über den inneren Schalenaufbau des Mondes zu gewinnen.[9]

Rover
- Raman-Spektrometer mit einem Wellenzahl-Bereich von 300–6000 cm−1 und einer Auflösung von 10 cm−1. Der CCD-Sensor des Mikroskops hat 256 × 256 Pixel, störendes Streulicht wird ausgeblendet. Mit diesem Gerät soll die mineralogische Zusammensetzung von Mondgestein und Regolith in einer gewissen Entfernung von der Landestelle untersucht, die Verteilung der Bodenschätze in der Fläche dokumentiert und die Mechanismen, die zu besagter Verteilung führten, erforscht werden.
- Bodenradar mit zwei Frequenzbereichen, die mit 10–110 MHz bzw. 100–1500 MHz höher liegen als bei dem entsprechenden Gerät auf Jadehase 2. Der Sichtbereich ist mit 40 m für die hohe Frequenz und 400 m für die niedere Frequenz ähnlich wie beim Vorgänger-Rover, die Auflösung mit 15 cm bei der hohen Frequenz sowie 2 m bei der niederen Frequenz aber doppelt bzw. fünfmal so gut. Das Bodenradar, das sowohl mit einfacher Polarisation als auch mit kombinierter Polarisation arbeiten kann, dient primär der Erkundung der oberflächennahen Bodenschichten, der Messung der Dicke der Regolithschicht und der Struktur der direkt darunter liegenden Schichten.[31]
- Magnetometer mit einem Messbereich von ±65.000 nT und einer Auflösung von 0,01 nT. Das Gerät soll Stärke und Richtung der vermuteten Reste des ursprünglichen Mondmagnetfelds – sogenannte „Magcons“ (magnetic concentrations) – bestimmen und dabei das Hintergrund-Magnetfeld herausrechnen, das während des Mondtags durch den Sonnenwind entsteht. Im Zusammenwirken mit dem Magnetometer auf dem Orbiter soll die Verteilung des magnetischen Feldgradienten im Landegebiet bestimmt und nach Möglichkeit dahinterstehende Gesetzmäßigkeiten ermittelt werden, um so Rückschlüsse auf den inneren Aufbau des Mondes ziehen zu können und einen Eindruck vom Weltraumwetter zu bekommen. Eine erste Signalverarbeitung findet bereits auf dem Orbiter statt.
- Mehrere Schürfsonden von jeweils 22 kg Gewicht, die in einem Abstand von 500–1000 m vom Lander ausgesetzt werden sollen (zur Einordnung: Jadehase 2 legte etwa 300 m pro Jahr zurück). Jede dieser Sonden soll mit einer Sprengladung mit einem TNT-Äquivalent von 100 g (etwas weniger als eine handelsübliche Handgranate) ein Loch von 1,5 m Tiefe erzeugen, wobei die Erschütterung von dem Seismographen auf dem Lander registriert wird. Über diesen Seismik-Ansatz will man einen Einblick in die tieferen Schichten des Regolith gewinnen und Rückschlüsse auf eventuell dort verborgene Eisvorkommen ziehen. Die Schürfsonden sind so gebaut, dass sie von Geröll mit einer Masse von bis zu 20 kg getroffen werden können, ohne Schaden zu nehmen. Gemessen werden sollen mit einer Präzision von 10 % folgende Stoffeigenschaften des Mondbodens:
Außerdem sollen folgende, eventuell verdampfte Stoffe registriert werden:
- Wasser
- Schwefelwasserstoff
- Kohlenstoffmonoxid
- Kohlenstoffdioxid
Kleinsonde
- Analysator für Wasserstoffisotope[35] sowie für Wasser- und organische Moleküle im Regolith, insbesondere Methan. Die hin und her fliegende Kleinsonde soll an ihren Landestellen Bodenproben nehmen, die das Gerät an Ort und Stelle auf Moleküle bis zu einem Gewicht von 100 amu untersucht. Wasser bzw. Eis in einer gegebenen Probe kann noch bis zu einem Massenanteil von 0,1 % erkannt werden. Solange der Eisgehalt in einer Probe nicht unter 1 % liegt, kann der Anteil von Wasserstoffisotopen mit einer Genauigkeit von 50 ‰ bestimmt werden. Das 8,5 kg schwere Gerät hat eine durchschnittliche Leistungsaufnahme von 50 W, die Bedarfsspitze liegt bei 70 W.
Weblinks
- Video von der Mission (chinesisch)
Einzelnachweise
- ↑ https://spacenews.com/chinas-change-7-moon-mission-to-target-shackleton-crater/
- ↑ 嫦娥六号任务计划于2024年5月由长征五号火箭发射. In: weibo.com. 25. April 2023, abgerufen am 25. April 2023 (chinesisch).
- ↑ a b c d e 甘永、杨瑞洪: 嫦娥七号任务搭载机遇公告. (PDF; 230 kB) In: cnsa.gov.cn. 21. September 2022, abgerufen am 21. September 2022 (chinesisch).
- ↑ 牛冉、张光、张鹏 et al.: 载人月球探测科学目标及着陆区选址建议. (PDF; 3,88 MB) In: yhxb.org.cn. 15. September 2023, archiviert vom (nicht mehr online verfügbar) am 3. Oktober 2023; abgerufen am 8. Oktober 2023 (chinesisch). Info: Der Archivlink wurde automatisch eingesetzt und noch nicht geprüft. Bitte prüfe Original- und Archivlink gemäß Anleitung und entferne dann diesen Hinweis. Enthält Liste mit den 30 wichtigsten Standorten.
- ↑ Zou Yongliao et al.: Overview of China’s Upcoming Chang’E Series and the Scientific Objectives and Payloads for Chang’E 7 Mission. (PDF; 123 kB) In: hou.usra.edu. 17. März 2020, abgerufen am 20. September 2020 (englisch).
- ↑ Basic structure for Intl Lunar Research Station to be built by 2028: China lunar exploration chief designer. In: globaltimes.cn. 22. November 2022, abgerufen am 22. November 2022 (englisch).
- ↑ 月表最强“打工人”——嫦娥四号从地球出发两周年啦! In: clep.org.cn. 8. Dezember 2020, abgerufen am 6. Januar 2023 (chinesisch).
- ↑ Xiao Xiao et al.: Thermophysical properties of the regolith on the lunar farside revealed by the in-situ temperature probing of Chang’E-4 mission. In: academic.oup.com. 26. August 2022, abgerufen am 22. September 2022 (englisch).
- ↑ a b c 吴伟仁, 于登云, 王赤 et al.: 月球极区探测的主要科学与技术问题研究. In: jdse.bit.edu.cn. 20. März 2020, abgerufen am 11. August 2021 (chinesisch).
- ↑ 张燕萍: 中国探月工程总设计师:嫦娥七号计划2026年前后发射,去月球南极找存在水的证据. In: china.huanqiu.com. 24. April 2023, abgerufen am 25. April 2023 (chinesisch).
- ↑ Ling Xin: Chinese scientists hold first conference to discuss building crewed moon base. In: scmp.com. 12. April 2023, abgerufen am 28. April 2023 (englisch).
- ↑ 李海涛: 中国深空测控网光通信技术途径分析与发展展望. In: irla.cn. 29. April 2020, abgerufen am 21. Mai 2021 (chinesisch).
- ↑ Andrew Jones: China loses UAE as partner for Chang’e-7 lunar south pole mission. In: spacenews.com. 24. März 2023, abgerufen am 24. März 2023 (englisch).
- ↑ 嫦娥七号任务概览-中国探月四期工程. In: bilibili.com. 28. August 2020, abgerufen am 21. Mai 2021 (chinesisch).
- ↑ 嫦娥七号月球车规模比玉兔二号更大,智能化方面也更强. In: ithome.com. 23. Januar 2023, abgerufen am 23. Januar 2023 (chinesisch).
- ↑ 中国探月工程未来规划简图. In: weibo.cn. 22. September 2022, abgerufen am 23. Januar 2023 (chinesisch).
- ↑ 高峰 et al.: 具有重复着陆能力的新型六足移动着陆器月面软着陆分析. In: x-mol.com. 31. Mai 2021, abgerufen am 28. Mai 2022 (chinesisch).
- ↑ Yin Ke et al.: Lunar Surface Fault-Tolerant Soft-Landing Performance and Experiment for a Six-Legged Movable Repetitive Lander. In: mdpi.com. 24. August 2021, abgerufen am 27. Mai 2022 (englisch).
- ↑ Manfred Lindinger: Wassereis auf dem Mond entdeckt. In: faz.net. 24. August 2018, abgerufen am 16. August 2020.
- ↑ 期待,中国深空探测“大动作”! In: cnsa.gov.cn. 28. November 2022, abgerufen am 2. Dezember 2022 (chinesisch).
- ↑ 扬帆起航的深空探测实验室. In: dsel.cc. 31. Oktober 2022, abgerufen am 24. November 2022 (chinesisch). Ab 3:15 im Video.
- ↑ Andrew Jones: China is moving ahead with lunar south pole and near-Earth asteroid missions. In: spacenews.com. 5. August 2020, abgerufen am 16. August 2020 (englisch).
- ↑ 嫦娥七号和小行星探测任务科普试验载荷创意设计征集. In: clep.org.cn. 29. Juli 2020, abgerufen am 29. Juli 2020 (chinesisch).
- ↑ 嫦娥七号和小行星探测任务科普试验载荷创意设计征集方案预选结果发布. In: cnsa.gov.cn. 21. April 2021, abgerufen am 21. April 2021 (chinesisch).
- ↑ 嫦娥七号任务科普试验载荷创意设计征集方案完成初选. In: clep.org.cn. 26. Mai 2021, abgerufen am 27. Mai 2021 (chinesisch).
- ↑ 冷媚: 我国计划2024年发射鹊桥二号中继星. In: stdaily.com. 17. Januar 2023, abgerufen am 17. Januar 2023 (chinesisch).
- ↑ 宋猗巍: 关于开展探月工程四期嫦娥七号任务载荷竞争择优的通知. In: clep.org.cn. 27. August 2020, abgerufen am 28. August 2020 (chinesisch).
- ↑ 中俄总理第二十八次定期会晤联合公报(全文). In: fmprc.gov.cn. 20. Dezember 2023, abgerufen am 25. Dezember 2023 (chinesisch).
- ↑ Andrew Jones: China targets permanently shadowed regions at lunar south pole. In: spacenews.com. 27. Mai 2022, abgerufen am 27. Mai 2022 (englisch).
- ↑ 柳钮滔 et al.: 月球永久阴影区着陆点选取要求的高分辨率极化SAR数据分析. In: jdse.bit.edu.cn. 28. Dezember 2021, abgerufen am 27. Mai 2022 (chinesisch).
- ↑ a b 空天院中标嫦娥七号有效载荷. In: zkxq.net. 1. April 2021, abgerufen am 27. Mai 2022 (chinesisch).
- ↑ 全月球储水量可达2700亿吨! In: cnsa.gov.cn. 30. März 2023, abgerufen am 1. April 2023 (chinesisch).
- ↑ He Huicun et al.: A solar wind-derived water reservoir on the Moon hosted by impact glass beads. In: nature.com. 27. März 2023, abgerufen am 1. April 2023 (englisch).
- ↑ Deutsche IMS-Station: Seismische Hilfsstation SNAA (AS035). In: bgr.bund.de. Abgerufen am 8. Dezember 2020.
- ↑ James P. Greenwood et al.: Hydrogen isotope ratios in lunar rocks indicate delivery of cometary water to the Moon. In: nature.com. 9. Januar 2011, abgerufen am 10. Dezember 2020 (englisch).
